8. 技术规格
8.1 xArm5/xArm6/xArm7 通用规格
| xArm Series | |
|---|---|
| 机器人类型 | xArm |
| 笛卡尔范围 | X: ±700mm; Y: ±700mm; Z: -400~951.5mm; Roll/Pitch/Yaw: ±180° |
| 最大关节速度 | 180°/s |
| 最大末端速度 | 1m/s |
| 重复定位精度 | ±0.1mm |
| 环境温度 | 0-50℃ |
| 功耗 | 最低8.4W,典型200W,推荐500W |
| 输入电源 | 24V DC, 20.8A |
| ISO洁净室等级 | 5 |
| 安装方向 | 任意角度 |
| 材料 | 铝、碳纤维 |
| 占地面积 | Ø 126 mm |
| 末端工具法兰 | DIN ISO 9409-1-A50/63(M5*6) |
| 机械臂通信协议 | 私有TCP协议(自定义) |
| 末端工具485通信协议 | Modbus TCP |
| 编程方式 | UFACTORY Studio图形界面, Python/C++/ROS底层接口 |
| 交流控制器 | 直流控制器 | |
|---|---|---|
| 输入 | 100-240V AC , 50/60Hz | 24-72V DC |
| 输出 | 24V DC 20.8A | 24V DC 672Wmax |
| 控制器通信协议 | 私有TCP协议(自定义) | 私有TCP协议(自定义) |
| 控制器通信方式 | Ethernet(以太网) | Ethernet(以太网) |
| 控制器IO接口 | 8×CI+8×DI(数字输入) 8×CO+8×DO(数字输出) 2×AI(模拟输入) 2×AO(模拟输出) 1×S-485 主 | 8×CI+8×DI(数字输入) 8×CO+8×DO(数字输出) 2×AI(模拟输入) 2×AO(模拟输出) 1×S-485 主 |
| 重量 | 3.9kg | 2.6kg |
| 尺寸(长×宽×高) | 285×135×101mm | 262×160×76mm |
| 机械爪 | |||
|---|---|---|---|
| 额定电压 | 24V DC | 最大输入电压 | 28V DC |
| 静态功耗 | 1.5W | 峰值电流 | 1.5A |
| 重量 | 802g | 最大夹持力 | 30N |
| 行程 | 84mm | 工作范围 | 0-84mm |
| 手指形态 | 可更换 | ||
| 通讯方式 | RS-485 | 通讯协议 | Modbus RTU |
| 可编程参数 | 速度、位置 | 反馈 | 位置 |
| 真空吸头(AS1200) | |||
|---|---|---|---|
| 额定电压 | 24V DC | 最大输入电压 | 28V DC |
| 最大负压 | -55kPa | 空气流量 | >4L/min |
| 重量 | 610g | 尺寸 | 122.5×91.6×75mm |
| 负载 | ≤5kg | 噪音 | <65dB |
| 静态电流 | 20mA | 峰值电流 | 500mA |
| 控制方式 | 数字IO | 状态指示灯 | 电源状态、工作状态 |
| 反馈 | 气压(低或常规) |
8.2 xArm5规格
| xArm5 | |
|---|---|
| 关节范围 | J1~J5 (±360°, -117~116°, -219~10°, -97~180°, ±360°) |
| 最大负载 | 3kg |
| 自由度 | 5 |
| 机械臂重量(不含控制器) | 11.3kg |
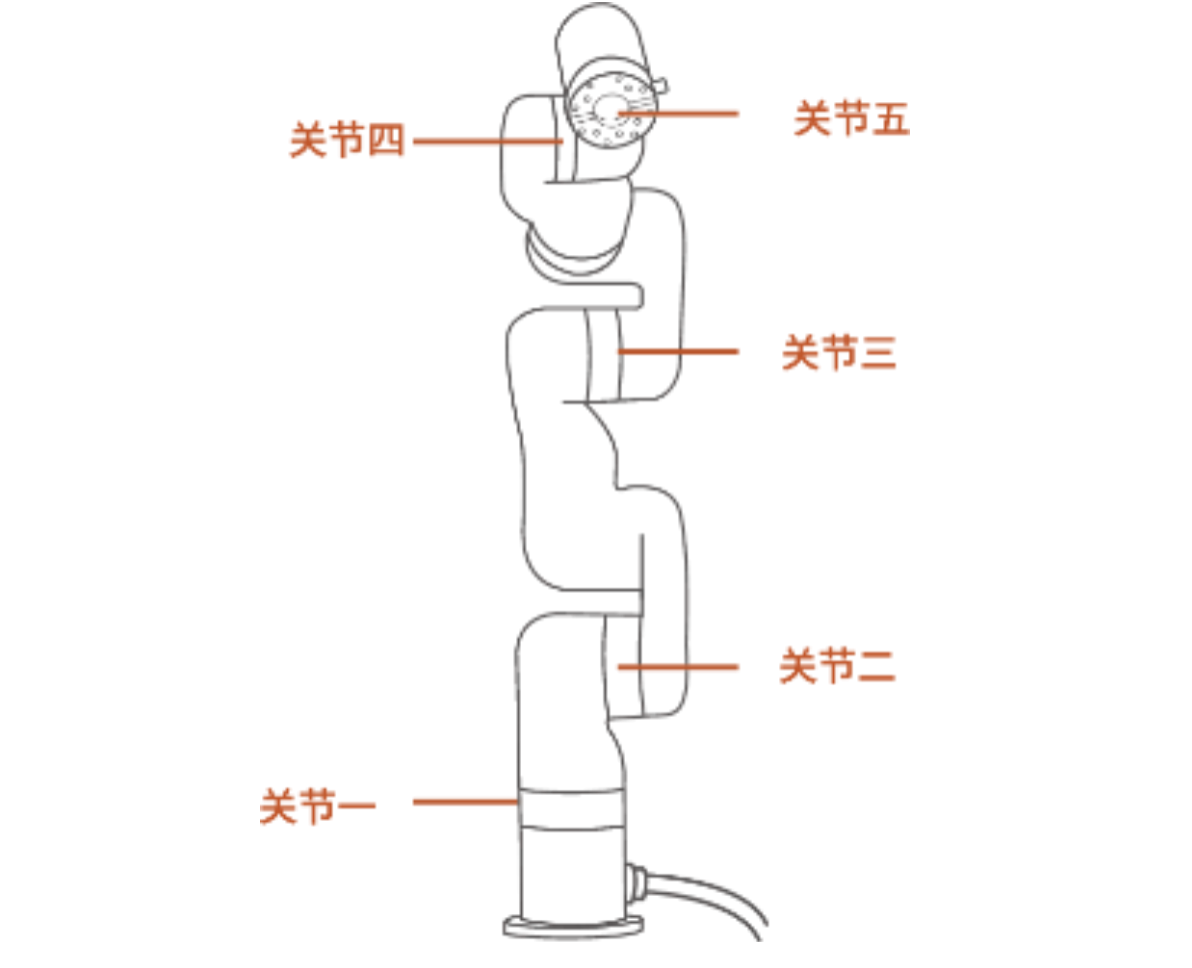 |  |
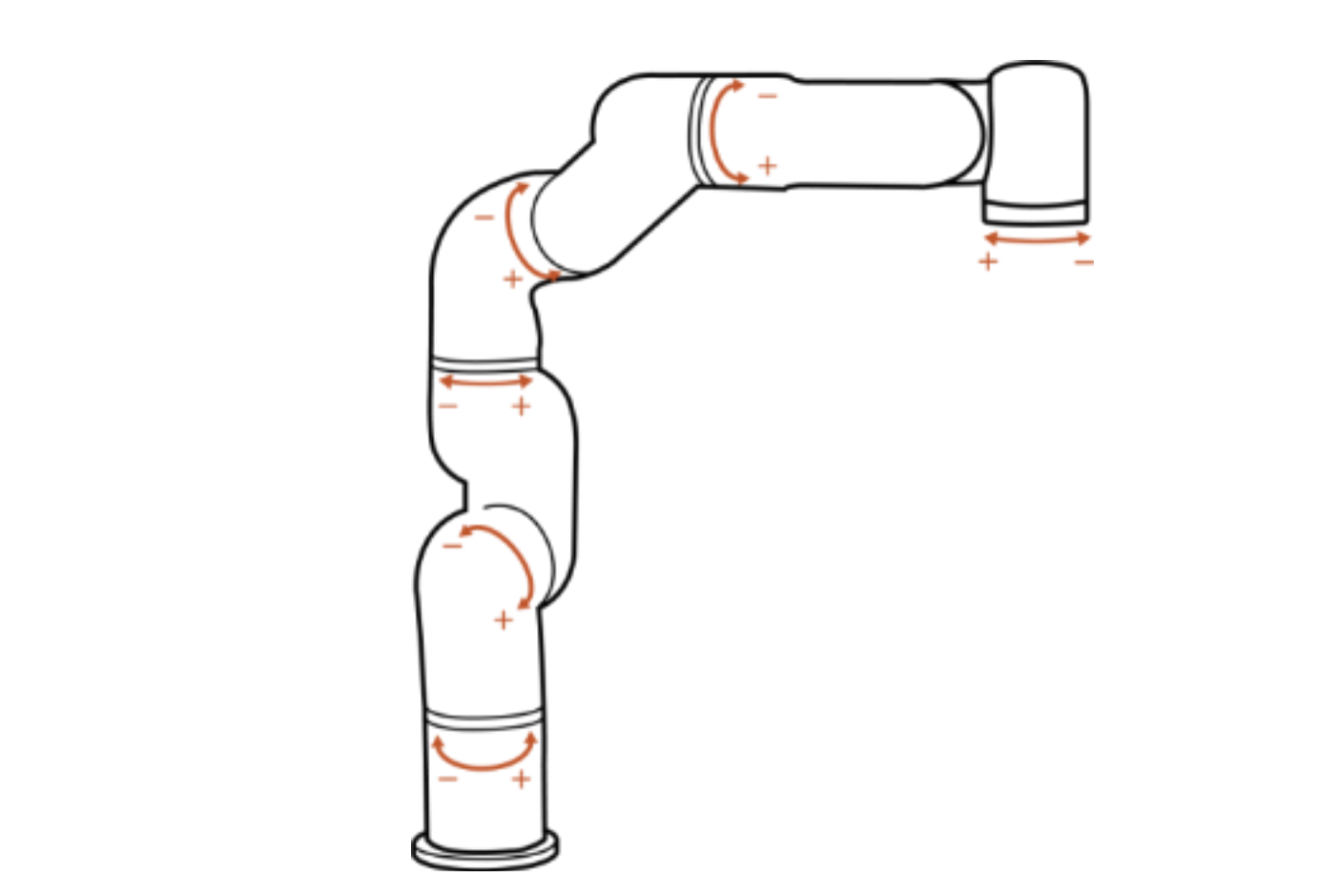
8.3 xArm6规格
| xArm6 | |
|---|---|
| 关节范围 | J1~J6 (±360°, -117~116°, -219~10°, ±360°, -97~180°, ±360°) |
| 最大负载 | 5kg |
| 自由度 | 6 |
| 机械臂重量(不含控制器) | 12.5kg |
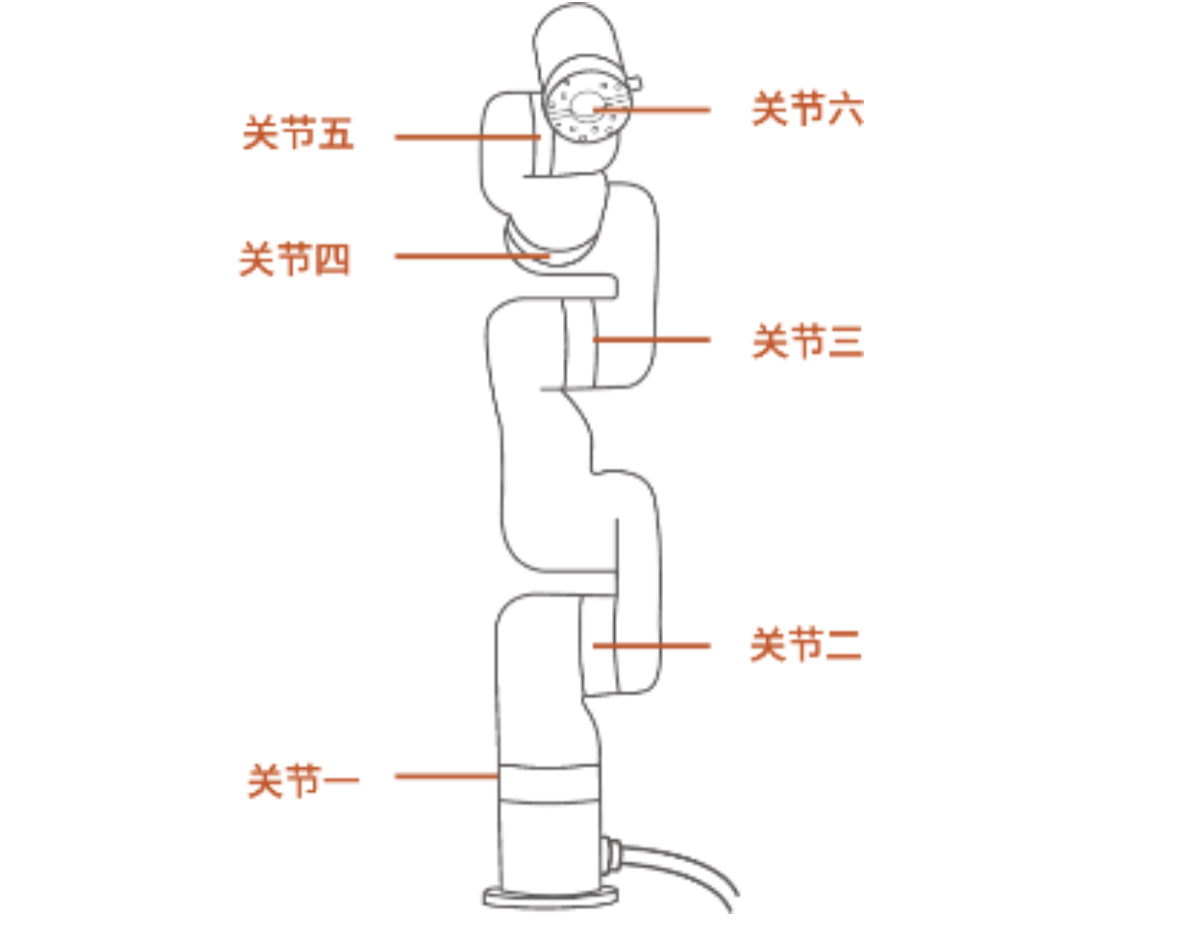 |  |
8.4 xArm7规格
| xArm7 | |
|---|---|
| 关节范围 | J1~J7 (±360°, -117~116°, ±360°, -6~225°, ±360°, -97~180°, ±360°) |
| 最大负载 | 3.5kg |
| 自由度 | 7 |
| 机械臂重量(不含控制器) | 14.3kg |
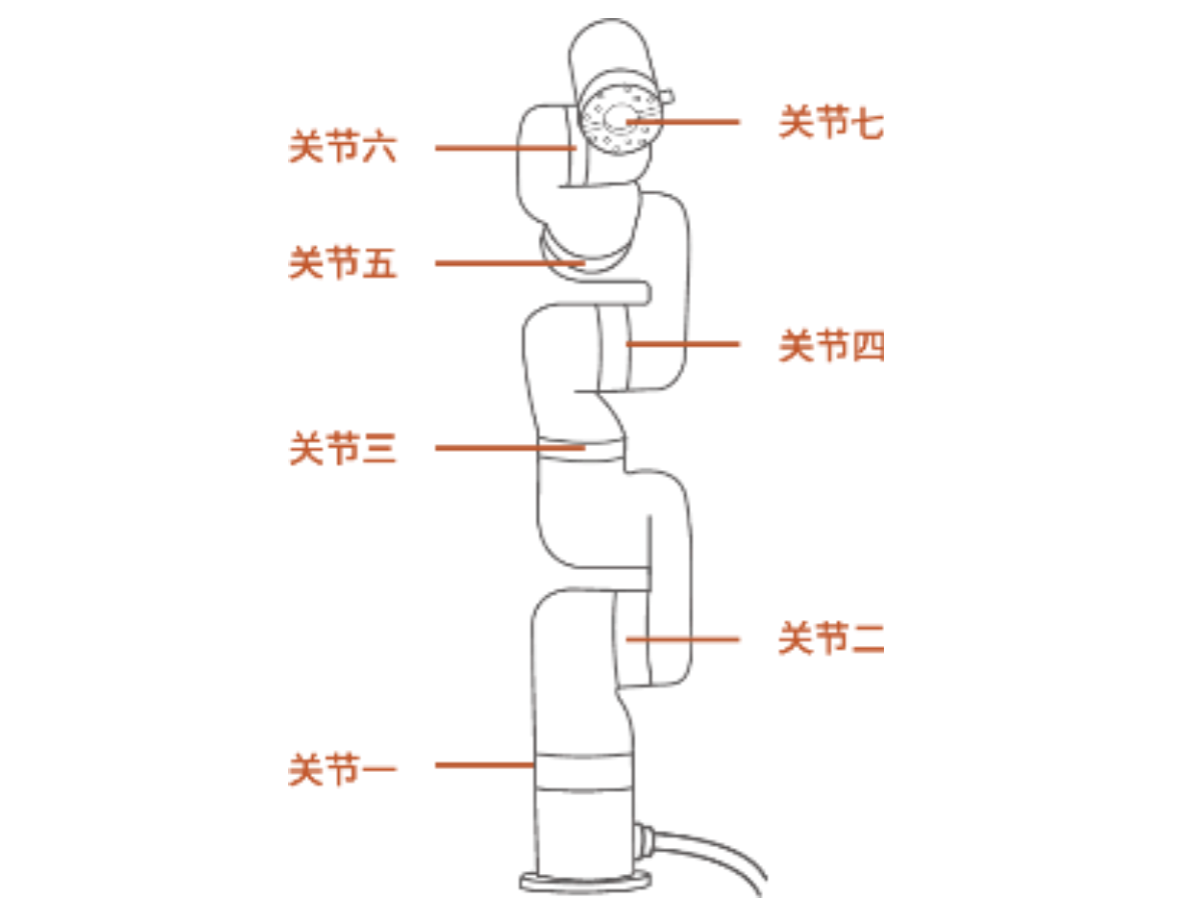 |  |