8. Technical Specifications
8.1 xArm5/xArm6/xArm7 Common Specifications
| xArm Series | |
|---|---|
| Robot Type | xArm |
| Cartesian Range | X: ±700mm; Y: ±700mm; Z: -400~951.5mm; Roll/Pitch/Yaw: ±180° |
| Maximum Joint Speed | 180°/s |
| Maximum Speed of End-Effector | 1m/s |
| Repeatability | ±0.1mm |
| Ambient Temperature Range | 0-50℃ |
| Power Consumption | Min 8.4W, Typical 200W, 500W Power is recommended. |
| Input Power Supply | 24V DC, 20.8A |
| ISO Class Cleanroom | 5 |
| Mounting Way | Any Direction |
| Materials | Aluminium, Carbon Fiber |
| Footprint | Ø 126 mm |
| End Flange | DIN ISO 9409-1-A50/63(M5*6) |
| Robotic Arm Communication Protocol | Private TCP(custom) |
| End Effector Communication Protocol | Modbus TCP |
| Programming | UFACTORY Studio, Python/C++/ROS |
| AC Controller | DC Controller | |
|---|---|---|
| Input | 100-240V AC 50/60 Hz | 24-72V DC |
| Output | 24V DC , 20.8A | 24V DC 672Wmax |
| Communication Protocol | Private TCP(custom) | Private TCP(custom) |
| Communication Method | Ethernet | Ethernet |
| I/O Interface | 8×CI+8×DI(Digital In) 8×CO+8×DO(Digital Out) 2×AI(Analog In) 2×AO(Analog Out) 1×RS-485 Master | 8×CI+8×DI(Digital In) 8×CO+8×DO(Digital Out) 2×AI(Analog In) 2×AO(Analog Out) 1×RS-485 Master |
| Weight | 3.9kg | 2.6kg |
| Dimension(L×W×H) | 285×135×101mm | 262×160×76mm |
| Gripper | |||
|---|---|---|---|
| Nominal Supply Voltage | 24V DC | Absolute Maximum Supply Voltage | 28V DC |
| Quiescent Power (Minimum Power Consumption) | 1.5W | Peak Current | 1.5A |
| Working Range | 84mm | Maximum Clamping Force | 30N |
| Weight | 802g | Communication Mode | RS-485 |
| Communication Protocol | Modbus TCP | Programmable Gripping Parameters | Position, Speed |
| Feedback | Position |
| Vacuum Gripper(AS1200) | |||
|---|---|---|---|
| Rated Supply Voltage | 24V DC | Absolute Maximum Supply Voltage | 28V DC |
| Vacuum | -55kPa | Vacuum Flow (L/min) | >4L/min |
| Weight | 610g | Dimensions (L×W×H) | 122.5×91.6×75 mm |
| Payload | ≤5kg | Noise Level(30cm away) | <60dB |
| Quiescent Current(mA) | 20mA | Peak Current(mA) | 500mA |
| Communication Mode | Digital IO | State Indicator | Power State, Working State |
| Feedback | Air Pressure(Low or Normal) |
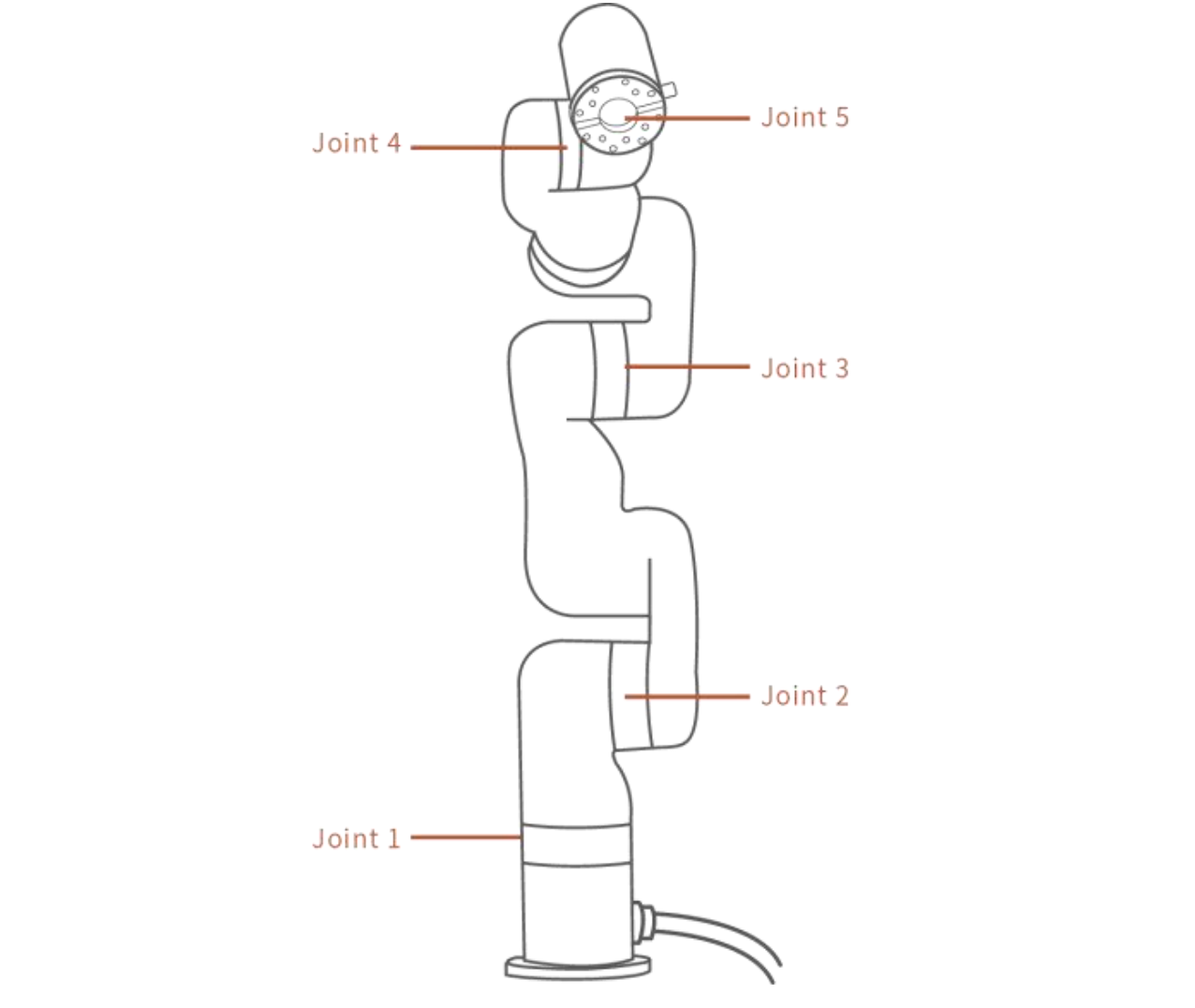
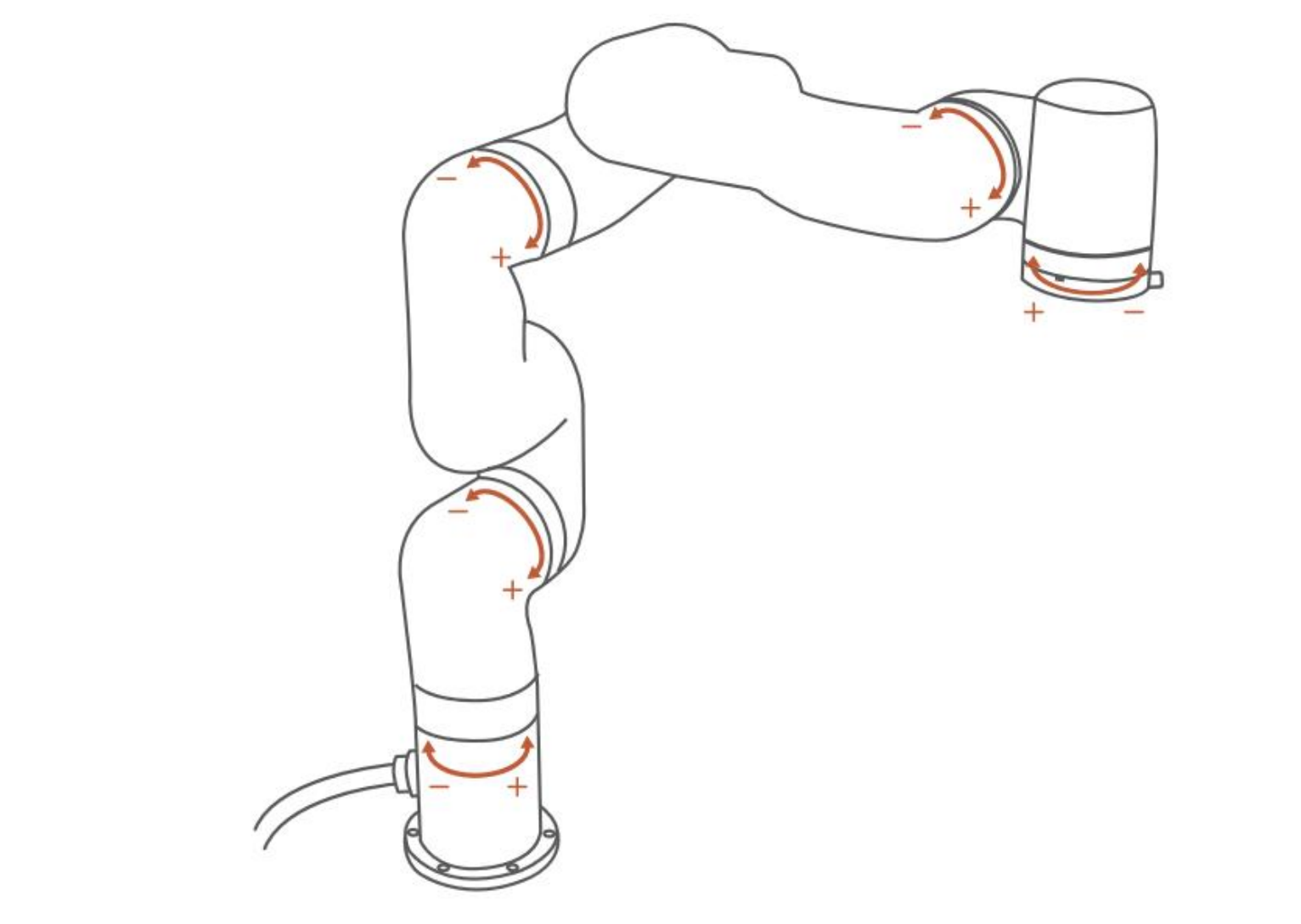
8.2 xArm5 Specifications
| xArm5 | |
|---|---|
| Joint Range | J1~J5 (±360°, -117~116°, -219~10°, -97~180°, ±360°) |
| Max Payload | 3kg |
| Degress of Freedom | 5 |
| Wight(robotic arm only) | 11.3kg |
 |  |
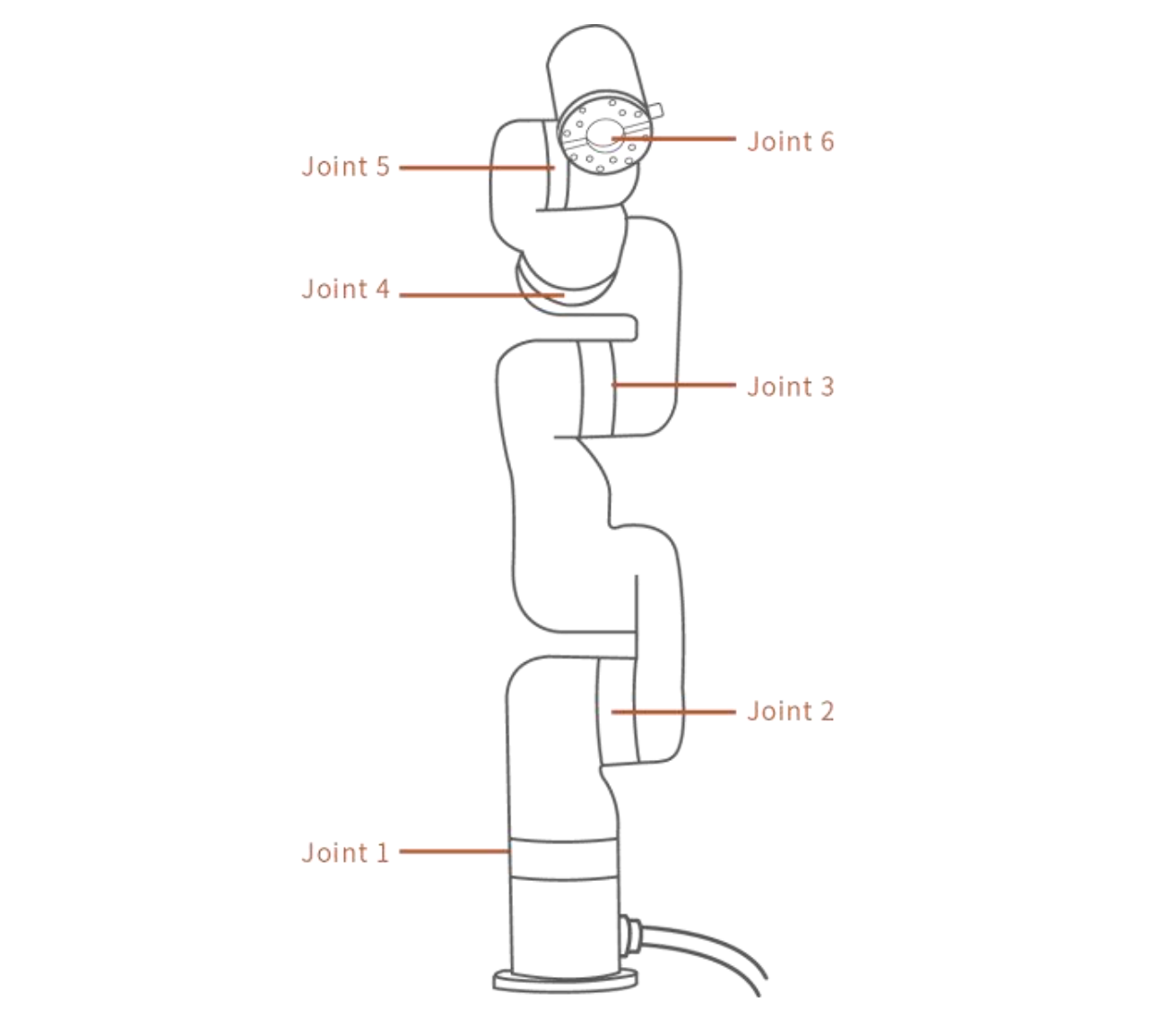
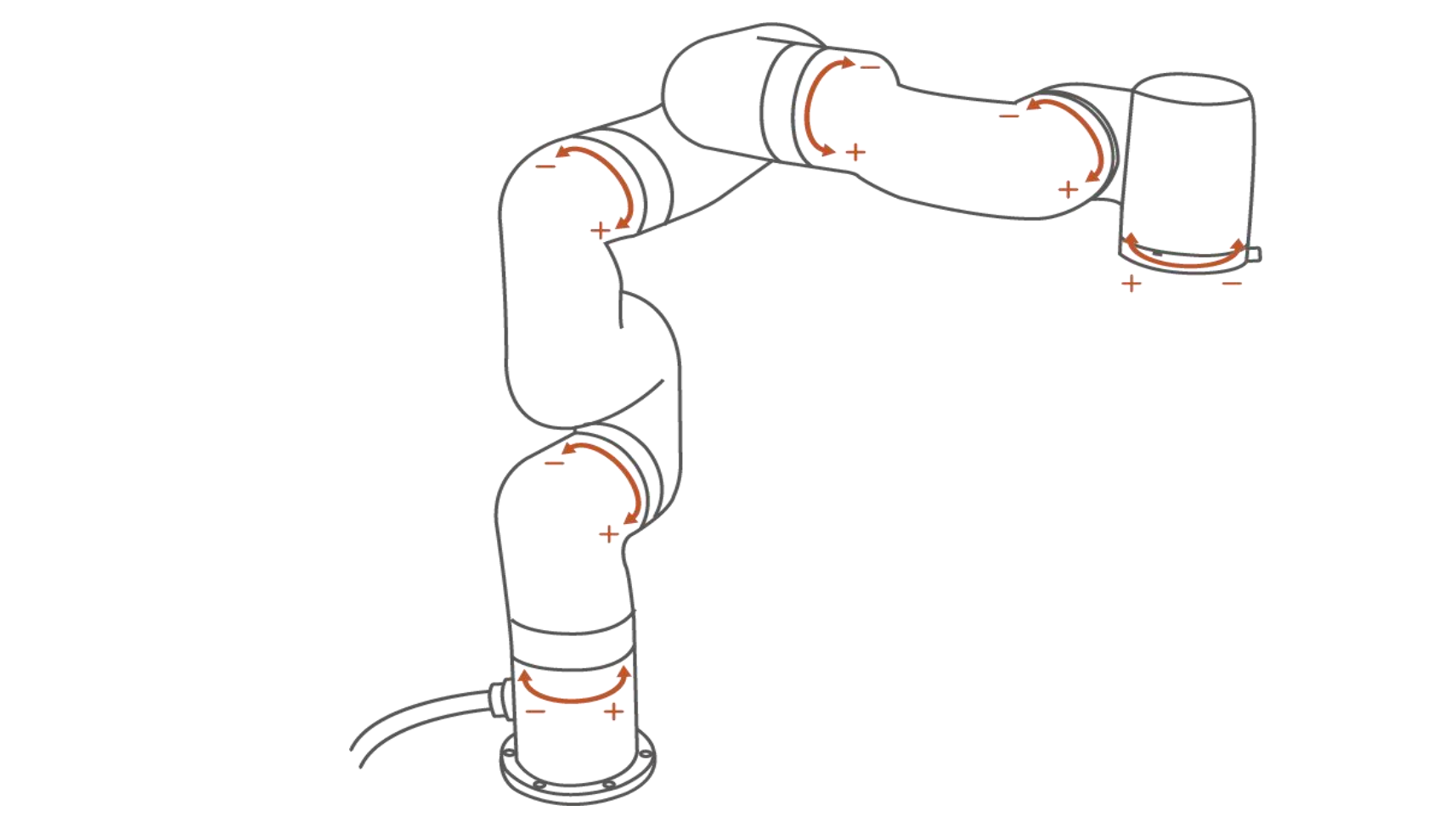
8.3 xArm6 Specifications
| xArm6 | |
|---|---|
| Joint Range | J1~J6 (±360°, -117~116°, -219~10°, ±360°, -97~180°, ±360°) |
| Max Payload | 5kg |
| Degress of Freedom | 6 |
| Wight(robotic arm only) | 12.5kg |
 |  |
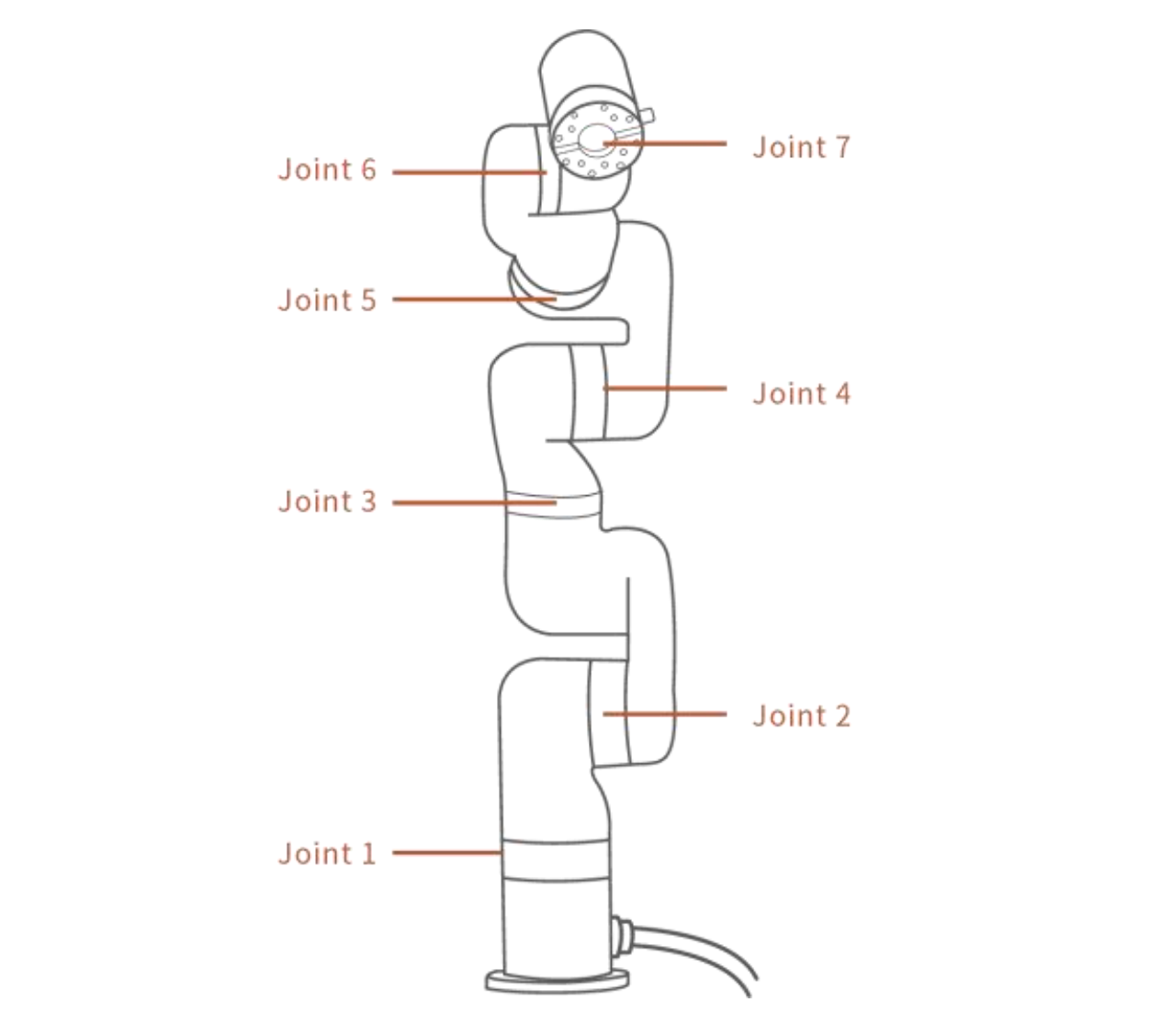
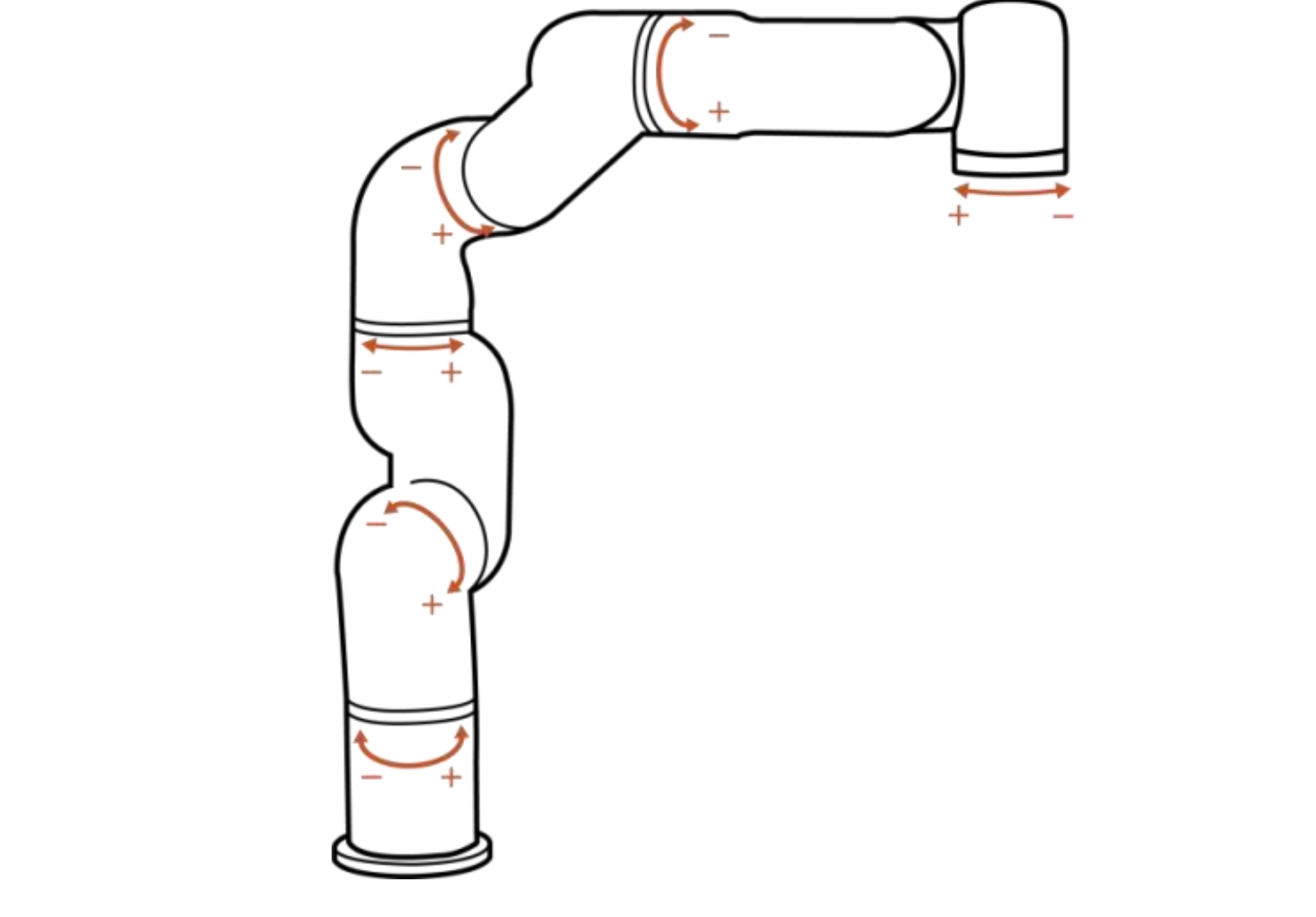
8.4 xArm7 Specifications
| xArm7 | |
|---|---|
| Joint Range | J1~J7 (±360°, -117~116°, ±360°, -6~225°, ±360°, -97~180°, ±360°) |
| Max Payload | 3.5kg |
| Degress of Freedom | 7 |
| Wight(robotic arm only) | 14.3kg |
 |  |